








হট সেল 6 ডিওএফ সিমুলেটর মোশন সিস্টেম
আমাদের 6DOF মোশন প্ল্যাটফর্ম বিভিন্ন স্থানিক গতির ভঙ্গি অনুকরণ করতে পারে এবং বিভিন্ন প্রশিক্ষণ সিমুলেটর যেমন ফ্লাইট সিমুলেটর, নেভাল শিপ সিমুলেটর, নেভাল হেলিকপ্টার টেক-অফ এবং ল্যান্ডিং সিমুলেশন প্ল্যাটফর্ম, ট্যাঙ্ক সিমুলেটর, কার ড্রাইভিং সিমুলেটর এবং ট্রেন ড্রাইভিং এর ক্ষেত্রে ব্যাপকভাবে প্রয়োগ করা যেতে পারে। সিমুলেটর এবং গতিশীল চলচ্চিত্র, বিনোদন সরঞ্জাম এবং তাই।

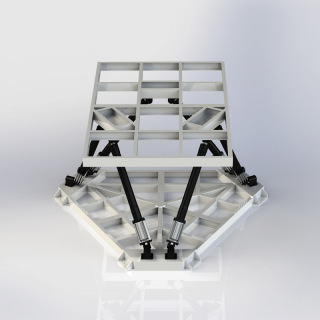
6 ডিওএফ মোশন প্ল্যাটফর্মের বৈশিষ্ট্য:
1. ইস্পাত দিয়ে তৈরি যা সুন্দর চেহারা, কম্প্যাক্ট গঠন, কম চলমান শব্দ এবং বজায় রাখা সহজ।
2. সম্পূর্ণ ডিজিটাল নিয়ন্ত্রণ সহ সার্ভো সিস্টেমটি সুনির্দিষ্ট নিয়ন্ত্রণের জন্য ব্যবহার করা হয়, প্ল্যাটফর্ম আন্দোলন মসৃণ এবং অবিচ্ছিন্ন, দ্রুত উচ্চ-গতির প্রতিক্রিয়া এবং স্থিতিশীল কম-গতির অপারেশন সহ।
3. সমান্তরাল রোবটের আমাদের নিজস্ব ডেডিকেটেড বল জয়েন্ট গ্রহণ করে, এর সর্বোচ্চ স্ট্রোক উচ্চ নির্ভুলতার সাথে 35° এ পৌঁছাতে পারে।
4. বৈদ্যুতিক সিলিন্ডার একটি নতুন সরাসরি-সংযুক্ত কাঠামো গ্রহণ করে যার ভিতরে মোটর তৈরি করা হয় যা এটিকে যথেষ্ট কমপ্যাক্ট করতে পারে। এদিকে, অতি-শান্ত নির্ভুলতা স্ক্রুও খুব কম শব্দের সাথে সিলিন্ডারে প্রয়োগ করা হয়।
5. সমস্ত আনত ব্লকগুলি মেশিনিং সেন্টারে সম্পন্ন হয় যা প্রতিটি দিকের অবস্থান নির্ভুলতা নিশ্চিত করতে পারে।
6. স্ব-উন্নত কন্ট্রোল কার্ড ব্যবহার করে, এটি বিভিন্ন 6টি ডিওএফ প্ল্যাটফর্ম ডেটা মডেল এবং অ্যালগরিদম মডেলকে একীভূত করে, এটি উপরের কম্পিউটার থেকে পোজ তারিখ গ্রহণ করে সংশ্লিষ্ট গাণিতিক ক্রিয়াকলাপ সম্পাদন করতে পারে এবং তারপরে ছয়টি সিলিন্ডারের স্ট্রোক গণনা করতে পারে। এটি প্ল্যাটফর্ম অপারেশনের স্নিগ্ধতা এবং গতিও সামঞ্জস্য করতে পারে।
প্রধান স্পেসিফিকেশন:
সিস্টেমের কর্মক্ষমতা
ভঙ্গি ইউনিট প্রশস্ততা বেগ হেভ মিমি ±500 200 মিমি/সেকেন্ড ঢেউ মিমি ±400 200মিমি/সেকেন্ড দোলনা মিমি ±400 200মিমি/সেকেন্ড পিচ ° ±30 10°/s রোল ° ±30 10°/s ইয়াও ° ±30 10°/s
পেলোড স্পেসিফিকেশন
| পণ্যের ওজন | 5021 কেজি |
| পেলোড | 4000 কেজি |
পন্যের মাত্রা
| দৈর্ঘ্য | 5000 মিমি |
| প্রস্থ | 3000 মিমি |
| ন্যূনতম উচ্চতা | 2670 মিমি |
পাওয়ার আবশ্যকতা
| পাওয়ার সাপ্লাই | 380V তিন ফেজ |
| সংযোগ | ইথারনেট |
কন্ট্রোল সিস্টেম (বৈদ্যুতিক ক্যাবিনেট)

কন্ট্রোল সিস্টেম: এমবেডেড কন্ট্রোল সফ্টওয়্যারটি প্রধান নিয়ামকের উপর চলে, এবং মোশন কন্ট্রোলারটি গুগাও উচ্চ-পারফরম্যান্স বাস মোশন কন্ট্রোলার ব্যবহার করে এবং ছয়-ডিগ্রির গতি নিয়ন্ত্রণ উপলব্ধি করতে আমাদের কোম্পানির দ্বারা স্বাধীনভাবে তৈরি ফরোয়ার্ড এবং ইনভার্স কাইনেমেটিক্স অ্যালগরিদম ব্যবহার করে। -অফ-ফ্রিডম মোশন প্ল্যাটফর্ম।
কন্ট্রোল সফ্টওয়্যারটি নিম্নলিখিত কার্যকরী মডিউলগুলি অন্তর্ভুক্ত করে তবে সীমাবদ্ধ নয়: সিস্টেম স্ব-পরিদর্শন ফাংশন মডিউল, নেটওয়ার্ক সংযোগ ফাংশন মডিউল, প্যারামিটার কনফিগারেশন ফাংশন মডিউল, স্টেট মেশিন ফাংশন মডিউল, ডেটা প্রিপ্রসেসিং ফাংশন মডিউল, ট্র্যাজেক্টরি প্ল্যানিং ফাংশন মডিউল, গতিবিদ্যা গণনা ফাংশন মডিউল , বাস কমিউনিকেশন ফাংশন মডিউল, ডিজিটাল I/O ফাংশন মডিউল, স্টেট ফিডব্যাক ফাংশন মডিউল, ফল্ট অ্যালার্ম ফাংশন মডিউল এবং সিকিউরিটি ফাংশন মডিউল।
কন্ট্রোল সফ্টওয়্যারটি সেকেন্ডারি ডেভেলপমেন্ট ইন্টারফেস প্রদান করে এবং পার্টি A-তে যোগাযোগ ইন্টারফেস এবং প্রোটোকল খোলে। সিক্স-ডিগ্রি-অফ-স্বাধীনতা প্ল্যাটফর্মটি মসৃণ, মসৃণ এবং হোঁচট না খেয়ে চলে। ফরোয়ার্ড এবং ইনভারস কাইনেমেটিক্স অ্যালগরিদমগুলি প্ল্যাটফর্মের মনোভাব বা বৈদ্যুতিক সিলিন্ডারের অবস্থান ডেটা রিয়েল টাইমে ফিড ব্যাক করে। অ্যালগরিদমটিতে প্ল্যাটফর্মের জন্য অভ্যন্তরীণ সুরক্ষা সুরক্ষা ফাংশন রয়েছে, যা ব্যবহারকারী ভুল করে ডেটা ইনপুট করলে প্ল্যাটফর্মের ক্ষতি করবে না!




