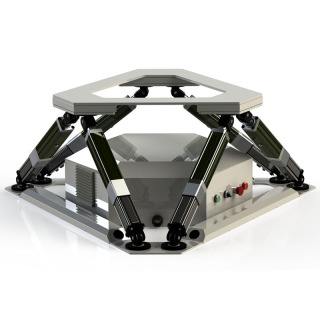
অটোমোবাইল ড্রাইভিং সিমুলেটর মোশন বেস
মোশন বেসগুলি বিভিন্ন প্রশিক্ষণ সিমুলেটরগুলিতে ব্যাপকভাবে ব্যবহৃত হয়, যেমন ফ্লাইট সিমুলেটর, জাহাজ সিমুলেটর, নেভাল হেলিকপ্টার টেক-অফ এবং ল্যান্ডিং সিমুলেশন প্ল্যাটফর্ম, ট্যাঙ্ক সিমুলেটর, কার ড্রাইভিং সিমুলেটর, ট্রেন ড্রাইভিং সিমুলেটর, ভূমিকম্প সিমুলেটর, গতিশীল চলচ্চিত্র, বিনোদন সরঞ্জাম এবং অন্যান্য ক্ষেত্রে , এবং এমনকি মহাকাশযানের ডকিং এবং এয়ার ট্যাঙ্কারের রিফুয়েলিং ডকিং এর মধ্যেও; সাংস্কৃতিক বিনোদন সরঞ্জাম, নতুন ইন্টারেক্টিভ বিনোদন অভিজ্ঞতা সরঞ্জাম, প্রকৌশল সিমুলেশন, নকশা মূল্যায়ন, পরীক্ষা, পরীক্ষা, টাস্ক প্রশিক্ষণ, প্রশিক্ষণ মূল্যায়ন, পরিবেশগত সিমুলেশন, ঘটনা পুনরাবৃত্তি, ইত্যাদি।
প্রধান স্পেসিফিকেশন:
সিস্টেমের কর্মক্ষমতা
ভঙ্গি ইউনিট প্রশস্ততা বেগ হেভ মিমি ±160 375 মিমি/সেকেন্ড ঢেউ মিমি ±160 375 মিমি/সেকেন্ড দোলনা মিমি ±160 375 মিমি/সেকেন্ড পিচ ° ±16 15°/s রোল ° ±16 15°/s ইয়াও ° ±16 15°/s
পেলোড স্পেসিফিকেশন
| পণ্যের ওজন | 349 কেজি |
| পেলোড | 1000 কেজি |
পন্যের মাত্রা
| দৈর্ঘ্য | 2000 মিমি |
| প্রস্থ | 1515 মিমি |
| ন্যূনতম উচ্চতা | 780 মিমি |
পাওয়ার আবশ্যকতা
| পাওয়ার সাপ্লাই | 380V তিন ফেজ |
| সংযোগ | ইথারনেট |
কন্ট্রোল সিস্টেম (বৈদ্যুতিক ক্যাবিনেট)

কন্ট্রোল সিস্টেম: এমবেডেড কন্ট্রোল সফ্টওয়্যার প্রধান নিয়ামকের উপর চলে, এবং মোশন কন্ট্রোলার গুগাও উচ্চ-পারফরম্যান্স বাস মোশন কন্ট্রোলার ব্যবহার করে এবং ছয়-ডিগ্রির গতি নিয়ন্ত্রণ উপলব্ধি করতে আমাদের কোম্পানির দ্বারা স্বাধীনভাবে বিকাশিত ফরোয়ার্ড এবং ইনভার্স কিনেমেটিক্স অ্যালগরিদম ব্যবহার করে। -অফ-ফ্রিডম মোশন প্ল্যাটফর্ম।
কন্ট্রোল সফ্টওয়্যারটি নিম্নলিখিত কার্যকরী মডিউলগুলি অন্তর্ভুক্ত করে তবে সীমাবদ্ধ নয়: সিস্টেম স্ব-পরিদর্শন ফাংশন মডিউল, নেটওয়ার্ক সংযোগ ফাংশন মডিউল, প্যারামিটার কনফিগারেশন ফাংশন মডিউল, স্টেট মেশিন ফাংশন মডিউল, ডেটা প্রিপ্রসেসিং ফাংশন মডিউল, ট্র্যাজেক্টরি প্ল্যানিং ফাংশন মডিউল, গতিবিদ্যা গণনা ফাংশন মডিউল , বাস কমিউনিকেশন ফাংশন মডিউল, ডিজিটাল I/O ফাংশন মডিউল, স্টেট ফিডব্যাক ফাংশন মডিউল, ফল্ট অ্যালার্ম ফাংশন মডিউল এবং সিকিউরিটি ফাংশন মডিউল।
কন্ট্রোল সফ্টওয়্যারটি সেকেন্ডারি ডেভেলপমেন্ট ইন্টারফেস প্রদান করে এবং পার্টি A-তে যোগাযোগের ইন্টারফেস এবং প্রোটোকল খোলে। সিক্স-ডিগ্রি-অফ-স্বাধীনতা প্ল্যাটফর্মটি মসৃণ, মসৃণ এবং হোঁচট ছাড়াই চলে। ফরোয়ার্ড এবং ইনভার্স কাইনেমেটিক্স অ্যালগরিদমগুলি প্ল্যাটফর্মের মনোভাব বা বৈদ্যুতিক সিলিন্ডারের অবস্থান ডেটা রিয়েল টাইমে ফিড ব্যাক করে। অ্যালগরিদমটিতে প্ল্যাটফর্মের জন্য অভ্যন্তরীণ সুরক্ষা সুরক্ষা ফাংশন রয়েছে, যা ব্যবহারকারী ভুল করে ডেটা ইনপুট করলে প্ল্যাটফর্মের ক্ষতি করবে না!